
Anexo:Momentos de inercia
El momento de inercia, indicado por I, mide la medida en que un objeto resiste la aceleración rotacional respecto de un eje particular, y es el análogo rotacional a la masa. Los momentos de inercia en masa tienen unidades de magnitud ML 2 ([masa] × [longitud] 2 ). No debe confundirse con el segundo momento de área, que se utiliza en los cálculos de vigas. El momento de inercia de la masa es a menudo conocido como inercia rotacional.
Para objetos sencillos con simetría geométrica, uno a menudo puede determinar el momento de inercia en una expresión de forma cerrada exacta. Típicamente esto ocurre cuándo la densidad de la masa es constante, pero en algunos casos la densidad puede variar a lo largo del objeto. En general, expresar el momento de inercia de formas asimétricas y/o con una distribución de masa más compleja puede no ser sencillo. Al momento de calcular momentos de inercia, es útil recordar que es una función aditiva y que hace uso de los teoremas del eje paralelo y del eje perpendicular.
Este artículo principalmente considera distribuciones de masa simétricas, con densidad constante en todo el objeto, y el eje de rotación considerado pasa por centro de masa, a menos que se especifique lo contrario.
Momentos de inercia[editar]
A continuación se presentan los momentos de inercia escalares. En general, el momento de inercia es un tensor, ver más abajo.
| Descripción | Figura | Momento(s) de inercia |
|---|---|---|
| Masa puntual M a una distancia r del eje de rotación.
Una masa puntual no posee un momento de inercia alrededor de su propio eje, pero utilizando el teorema del eje paralelo se obtiene un momento de inercia alrededor de un eje distante de rotación. |

|
|
| Dos masas puntuales, m1 y m2, con masa reducida μ y separadas a una distancia x, alrededor de un eje que pasa a través del centro de masa del sistema y perpendicular a la línea que une las dos partículas. | 
|
|
| Varilla de longitud L y masa m, rotando alrededor de su centro.
Esta expresión supone que la varilla es un alambre infinitamente delgado (pero rígido). Este es un caso particular de una placa rectangular delgado con eje de rotación en su centro, con w = L y h = 0. |

|
[1] |
| Varilla de longitud L y masa m, rotando alrededor de uno de sus extremos.
Esta expresión supone que la varilla es un alambre infinitamente delgado (pero rígido). Este también es un caso particular de una placa rectangular delgada con eje de rotación en su centro, con h = L y w = 0. |

|
[1] |
| Espira circular delgada de radio r y masa m.
Este es un caso particular de un toroide de a = 0 (ver abajo), así como de un tubo cilíndrico de pared gruesa sin tapas, con r1 = r2 y h = 0. |

|
|
| Disco macizo delgado de radio r y masa m.
Este es un caso particular del cilindro macizo con h = 0. es una consecuencia del teorema del eje perpendicular. |

|
|
| Tubo cilíndrico delgado sin tapas, de radio r y masa m.
Esta expresión supone que el espesor de la pared del tubo es despreciable. Este es un caso particular del cilindro macizo de pared gruesa con r1 = r2. También, una masa puntual m en el extremo de una varilla de longitud r tiene este mismo momento de inercia y el valor r se denomina el radio de giro. |

|
[1] |
| Cilindro macizo de radio r, altura h y masa m.
Este es un caso particular del cilindro macizo de pared gruesa con r1 = 0. |

|
[1] |
| Tubo cilíndrico de pared gruesa sin tapas, de radio interior r1, radio exterior r2, altura h y masa m. | 
|
[1][2] donde t = (r2 - r1)/r2 es una razón normalizada de espesor;
|
| Con una densidad ρ y la misma geometría.
Nota: esto es para un objeto con una densidad constante. |
| |
| Tetraedro regular de lado s y masa m. | 
|
[3] |
| Octaedro regular de lado s y masa m. | 
|
[3][3] |
| Dodecaedro regular de lado s y masa m. | donde [3] | |
| Icosaedro regular de lado s y masa m. |
[3] | |
| Esfera hueca de radio r y masa m.
Se puede considerar que una esfera hueca está formada por dos pilas de anillos infinitesimalmente delgados, circulares, donde el radio difiere de 0 a r (o una sola pila, donde el radio difiere de −r a r). |

|
[1] |
| Esfera maciza (bola) de radio r y masa m.
Se puede considerar que una esfera maciza está formada por dos pilas de discos infinitesimalmente delgados, circulares, donde el radio difiere de 0 a r (o una sola pila, donde el radio difiere de −r a r). |

|
[1] |
| Esfera (cáscara) de radio r2 y masa m, con cavidad esférica centrada de radio r1.
Cuando el radio de cavidad r1 = 0, el objeto es una bola maciza (ver arriba). Cuando r1 = r2, y el objeto es una esfera hueca. |

|
[1] |
| Cono circular recto con radio r, altura h y masa m. | 
|
[4][4] |
| Cono hueco circular recto con radio r, altura h y masa m. |
|
[4][4] |
| Toroide con radio menor a, radio mayor b y masa m. | .png)
|
Alrededor de un eje que pasa por el centro y es perpendicular al diámetro mayor: [5] Alrededor del diámetro mayor: [5] |
| Elipsoide (maciza) de semiejes a, b, y c con masa m. | 
|
|
| Placa rectangular delgada de altura h, ancho w y masa m (eje de rotación en el borde de la placa). | 
|
|
| Placa rectangular delgada de altura h, ancho w y masa m (eje de rotación en el centro) | 
|
[1] |
| Ortoedro macizo de altura h, ancho w, y profundidad d, y masa m.
Para un cubo de lado s orientado de la misma manera: . |

|
|
| Ortoedro macizo de altura D, ancho W, y profundidad L, y masa m, rotando alrededor de su diagonal mayor.
Para un cubo de lado s orientado de la misma manera: . |

|
|
| Ortoedro macizo inclinado de profundidad d, ancho w, y longitud l, y masa m, rotando alrededor del eje vertical (eje y en figura). | 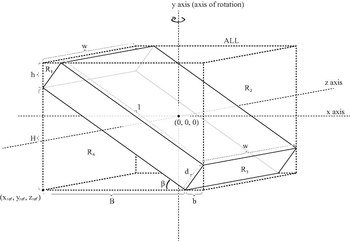
|
[6] |
| Triángulo con vértices en el origen y en P y Q, con masa m, rotando alrededor de un eje perpendicular al plano y que pasa por el origen. | ||
| Polígono plano con vértices P1, P2, P3, ..., PN y masa m uniformemente distribuida en su interior, rotando alrededor de un eje perpendicular al plano y que pasa por el origen. | 
|
|
| Polígono plano regular con n-vértices y masa m uniformemente distribuida en su interior, rotando alrededor de un eje perpendicular al plano y que pasa por su baricentro. R es el radio del círculo circunscrito. | [7] | |
| Un triángulo isósceles de masa M, ángulo de vértice 2β y longitud de lado común L (eje pasando por la punta, perpendicular al plano). | [7] | |
| Disco infinito con masa distribuida en una distribución gaussiana multivariante en dos ejes alrededor del eje de rotación con densidad de masa como función del vector de posición x.
|

|
|
| Disco uniforme sobre un eje perpendicular a su borde. | [8] |




































































Lista de tensores de inercia en 3 dimensiones[editar]
Esta lista de tensores de momento de inercia se proporciona para los ejes principales de cada objeto.
Para obtener los momentos escalares de inercia I anteriores, el tensor momento de inercia I se proyecta a lo largo de un eje definido por un vector unitario n de acuerdo con la fórmula:
- ,

donde los puntos indican la contracción de tensor y se usa la convención de suma de Einstein . En la tabla anterior, n sería la unidad de base cartesiana ex, ey, ez para obtener Ix, Iy, Iz respectivamente.
| Descripción | Figura | Tensor momento de inercia |
|---|---|---|
| Esfera maciza de radio r y masa m. |
|
|
| Esfera hueca de radio r y masa m. |
|
|
| Elipsoide maciza de semiejes a, b, c y masa m. | 
|
|
| Cono circular recto de radio r, altura h y masa m, alrededor del vértice. |
|
|
| Ortoedro macizo de ancho w, altura h, profundidad d, and masa m. | |
|
| Varilla delgada alineada con el eje y, de longitud l y masa m, alrededor de un extremo. | |
|
| Varilla delgada alineada con el eje y, de longitud l y masa m, alrededor de su centro. | |
|
| Cilindro macizo de radio r, altura h y masa m, |
|
|
| Tubo cilíndrico de pared gruesa sin tapas, de radio interior r1, radio exterior r2, longitud h y masa m. |
|
|









Véase también[editar]
Referencias[editar]
- ↑ a b c d e f g h i Raymond A. Serway (1986). Physics for Scientists and Engineers (2nd edición). Saunders College Publishing. p. 202. ISBN 0-03-004534-7.
- ↑ Classical Mechanics - Moment of inertia of a uniform hollow cylinder (enlace roto disponible en este archivo)..
- ↑ a b c d e Satterly, John (1958). «The Moments of Inertia of Some Polyhedra». The Mathematical Gazette (Mathematical Association) 42 (339): 11-13. doi:10.2307/3608345.
- ↑ a b c d Ferdinand P. Beer and E. Russell Johnston, Jr (1984). Vector Mechanics for Engineers, fourth ed. McGraw-Hill. p. 911. ISBN 0-07-004389-2. Error en la cita: Etiqueta
<ref>no válida; el nombre «beer» está definido varias veces con contenidos diferentes - ↑ a b Eric W. Weisstein. «Moment of Inertia — Ring». Wolfram Research. Consultado el 14 de diciembre de 2016.
- ↑ A. Panagopoulos and G. Chalkiadakis.
- ↑ a b David Morin (2010). Introduction to Classical Mechanics: With Problems and Solutions; first edition (8 january 2010). Cambridge University Press. p. 320. ISBN 0521876222.
- ↑ «Archived copy». Archivado desde el original el 24 de septiembre de 2015. Consultado el 23 de noviembre de 2014.