
Motor de vapor marino

Un motor de vapor marino es una máquina de vapor que se utiliza para impulsar una embarcación. Este artículo trata principalmente de las máquinas de vapor marinas del tipo recíproco, que se utilizaron desde el inicio del barco de vapor a principios del siglo XIX hasta sus últimos años de fabricación a gran escala durante la Segunda Guerra Mundial. Las máquinas de vapor recíprocas fueron reemplazadas progresivamente en aplicaciones marinas durante el siglo XX por turbinas de vapor y por motores diésel marinos.
Historia[editar]
La primera máquina de vapor comercialmente exitosa fue desarrollada por Thomas Newcomen en 1712. Los perfeccionamientos introducidos por James Watt en la segunda mitad del siglo XVIII mejoraron en gran medida su eficiencia, y permitieron construir motores más compactos. La adaptación exitosa de la máquina de vapor a las aplicaciones marinas en Inglaterra tendría que esperar hasta casi un siglo después de Newcomen, cuando el ingeniero escocés William Symington construyó el "primer barco de vapor práctico" del mundo, el Charlotte Dundas, en 1802.[1] En 1807, el estadounidense Robert Fulton construyó el primer barco de vapor comercialmente exitoso del mundo, conocido como North River Steamboat, que funcionaba con un motor Watt.
Tras el éxito de Fulton, la tecnología de los barcos de vapor se desarrolló rápidamente en ambos lados del Atlántico. Aunque inicialmente tenían un alcance corto y no eran particularmente aptos para navegar debido a su peso, baja potencia y tendencia a romperse, fueron empleados con éxito a lo largo de ríos y canales, y para viajes cortos a lo largo de la costa. El primer cruce transatlántico exitoso realizado por un barco de vapor se produjo en 1819, cuando el Savannah navegó desde Savannah, Georgia, hasta Liverpool, Inglaterra. El primer barco de vapor en hacer cruces transatlánticos regulares fue el vapor de ruedas de paletas Great Western, en 1838.[2]
A medida que avanzaba el siglo XIX, las máquinas de vapor marinas y la tecnología de los buques de vapor se desarrollaron paralelamente. La propulsión de paletas dio paso gradualmente a la hélice; y la introducción de cascos de hierro y luego de acero para reemplazar el casco de madera tradicional permitió que los barcos crecieran cada vez más, lo que requirió disponer de propulsores de vapor cada vez más complejos y potentes.[3]
Tipos de motores de vapor marinos[editar]

A lo largo del siglo XIX se desarrolló una amplia variedad de motores de vapor marinos alternativos. Los dos métodos principales para clasificar dichos motores son por el mecanismo de conexión y por la tecnología de los cilindros.
La mayoría de los primeros motores marinos tenían la misma tecnología en sus cilindros (la expansión simple, véase más abajo), pero se usaban varios métodos diferentes para suministrar energía al cigüeñal (es decir, mecanismos de conexión). Por lo tanto, los primeros motores marinos se clasificaban principalmente según su mecanismo de conexión. Algunos mecanismos de conexión comunes fueron de leva lateral, campanario, viga andante y acción directa (véanse las siguientes secciones).
Sin embargo, las máquinas de vapor también se pueden clasificar de acuerdo con la tecnología del cilindro (expansión simple, compuesto, anular, etc.). Por lo tanto, se pueden encontrar ejemplos de motores clasificados bajo ambos métodos. Por ejemplo, un motor puede ser de tipo compuesto y de viga andante. Compuesto hace referencia a la tecnología del cilindro, y viga andante es el método de conexión. Con el tiempo, a medida que la mayoría de los motores se volvieron de acción directa, pero las tecnologías de los cilindros se volvieron más complejas, se comenzó a clasificar los motores únicamente según la tecnología de los cilindros.
Los tipos de motores de vapor marinos más comunes se enumeran en las siguientes secciones. Téngase en cuenta que no todos estos términos son exclusivos de las aplicaciones marinas.
Motores clasificados por el mecanismo de conexión[editar]
Leva lateral[editar]
El motor de leva lateral fue el primer tipo de motor de vapor ampliamente adoptado para uso marino en Europa.[4][5] En los primeros años de la navegación a vapor (a partir de 1815), la leva lateral era el tipo más común de motor marino para vías navegables y servicios costeros en Europa, y siguió siendo durante muchos años el motor preferido para la navegación oceánica a ambos lados del Atlántico.[6]
La leva (o palanca) lateral era una adaptación de la primera forma de motor de vapor, el motor de balancín. El típico motor de palanca lateral tenía un par de pesadas vigas horizontales de hierro, conocidas como levas laterales, que se conectaban en el centro a la parte inferior del motor con un pasador. Esta conexión permitía que las levas pivotaran describiendo un arco limitado. Las levas se extendían, a cada lado de la parte inferior del cilindro vertical del motor. Un vástago conectado verticalmente al pistón, se prolongaba desde la parte superior del cilindro. Esta barra unida a una cruceta horizontal, estaba conectada en cada extremo a barras verticales (conocidas como barras laterales), conectadas a las levas a cada lado del cilindro, formando la conexión de las palancas al pistón en el lado del cilindro del motor. El otro lado de las palancas (el extremo opuesto del pivote de la palanca al cilindro) estaban conectados entre sí mediante una cruceta. Esta cruceta a su vez se conectaba y operaba sobre una sola biela, que hacía girar el cigüeñal, y que era impulsada por las levas, que situadas junto al cilindro, que a su vez eran movidas por la oscilación vertical del pistón.[7]
Las principales desventajas del motor de leva lateral eran su tamaño y su peso.[5] Para el servicio en vías navegables y costeras, diseños más livianos y eficientes pronto lo reemplazaron. Sin embargo, siguió siendo el tipo de motor dominante para el servicio oceánico durante gran parte de la primera mitad del siglo XIX, debido a su centro de gravedad relativamente bajo, lo que daba a los barcos mayor estabilidad en mares agitados.[6] También era un tipo de motor común para los buques de guerra,[8] ya que su altura relativamente baja lo hacía menos susceptible a sufrir daños en combate. Desde el primer buque de vapor de la Royal Navy en 1820 hasta 1840, 70 buques de vapor entraron en servicio. La mayor parte de ellos montaba motores de levalateral, utilizando calderas con una presión máxima de 4 libras por pulgada cuadrada (2,8 mca). Las bajas presiones de vapor a su vez llevaron a los cilindros de grandes tamaños, puesto que la presión efectiva sobre el pistón era la diferencia entre la presión de la caldera y el vacío en el condensador.
El motor de leva lateral normalmente impulsaba ruedas de paletas y no era adecuado para accionar hélices. El último barco construido para el servicio transatlántico que tenía un motor de leva lateral fue el vapor de paletas RMS Scotia de la línea Cunard, considerado un anacronismo cuando entró en servicio en 1862.[9]
-
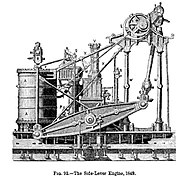 Motor de leva lateral (SS Pacific 1849)
Motor de leva lateral (SS Pacific 1849) -
 Motor de leva lateral del RMS Persia (1855)
Motor de leva lateral del RMS Persia (1855) -




Saltamontes[editar]

El saltamontes o motor de 'media leva'[10] era una variante del motor de leva lateral. Se diferencia de la palanca lateral convencional en que la ubicación del pivote de la palanca y la biela estaban más o menos invertidas, con el pivote ubicado en un extremo de la palanca en lugar del centro, mientras que la biela está unida a la palanca entre el cilindro en un extremo y el pivote en el otro.[11]
Las principales ventajas del motor saltamontes fueron el bajo costo de construcción y su robustez, y se decía que requería menos mantenimiento que cualquier otro tipo de motor de vapor marino. Otra ventaja era que el motor podía arrancarse fácilmente desde cualquier posición del ciclo. Sin embargo, al igual que el motor de palanca lateral convencional, los motores saltamontes estaban en desventaja por su peso y tamaño. Se utilizaron principalmente en pequeñas embarcaciones, como barcos fluviales y remolcadores.[11]
Cruceta (cuadrado)[editar]
El motor de cruceta, también conocido como motor cuadrado, de aserradero o de bastidor en A, era un tipo de motor aplicado a las ruedas de paletas, utilizado frecuentemente en los primeros años de la navegación a vapor estadounidense.[12]
El motor de cruceta dispone de un cilindro vertical sobre el cigüeñal, con el vástago del pistón asegurado a una cruceta horizontal, desde cada extremo del cual, en los lados opuestos del cilindro, se extiende una biela que hace girar su propio cigüeñal separado.[13] La cruceta se desplazaba dentro de unas guías verticales para que el mecanismo mantuviera la trayectoria correcta mientras se movía.[14] El nombre alternativo del motor, "bastidor en A", probablemente derivó de la forma de los soportes que servían de guías. Algunos motores de cruceta tenían más de un cilindro, en cuyo caso las varillas del pistón generalmente estaban conectadas a la misma cruceta. Una característica inusual de los primeros ejemplos de este tipo de motor fue la instalación de volantes de inercia, orientados a los cigüeñales, que se consideraron necesarios para garantizar un funcionamiento sin problemas. Estos engranajes a menudo eran ruidosos en funcionamiento.
Debido a que el cilindro estaba por encima del cigüeñal en este tipo de motor, tenía un centro de gravedad alto y, por lo tanto, se consideraba inadecuado para el servicio oceánico.[15] Esto lo limitó en gran medida a embarcaciones construidas para vías navegables interiores.[13] A medida que los motores marinos se hicieron cada vez más grandes y pesados a lo largo del siglo XIX, el alto centro de gravedad de los motores de cruceta cuadrada se volvió cada vez menos práctico, y en la década de 1840, los constructores de barcos los abandonaron en favor del motor de viga andante.[16]
El nombre de este motor puede causar confusión, ya que "cruceta" también es un nombre alternativo para el motor de campanario (que se describe a continuación). Por lo tanto, muchas fuentes prefieren referirse a él por su nombre informal de motor "cuadrado" para evitar confusiones. Además, la cruceta marina o el motor cuadrado descritos en esta sección no deben confundirse con el término "motor cuadrado" tal como se aplica a los motores de combustión interna, que en este último caso se refiere a un motor cuyo diámetro es igual a su carrera.
-
 Diagrama de un típico motor de cruceta de vapor del río Hudson (vista lateral)
Diagrama de un típico motor de cruceta de vapor del río Hudson (vista lateral) -
 El barco de vapor de 1836 Nueva York. Entre las ruedas de paletas se encuentra el motor cuadrado alto o de "bastidor en A", dentro del cual se puede ver el largo vástago del pistón, cerca de la parte superior de su carrera, formando una "T" con la cruceta horizontal
El barco de vapor de 1836 Nueva York. Entre las ruedas de paletas se encuentra el motor cuadrado alto o de "bastidor en A", dentro del cual se puede ver el largo vástago del pistón, cerca de la parte superior de su carrera, formando una "T" con la cruceta horizontal


Viga andante[editar]
La viga andante, también conocida como "viga vertical", "viga aérea", o simplemente "viga", fue otra adaptación temprana del motor de balancín, pero su uso se limitó casi por completo a los Estados Unidos.[17] Después de su introducción, la viga andante se convirtió rápidamente en el tipo de motor más popular en Estados Unidos para el servicio de vías navegables y costeras, y el tipo demostró tener una longevidad notable, ya que estos motores todavía se fabricaron ocasionalmente hasta la década de 1940. En aplicaciones marinas, la viga en sí misma generalmente estaba reforzada con puntales de hierro que le daban una forma de diamante característica, aunque los soportes sobre los que descansaba a menudo estaban construidos de madera. El adjetivo "andante" se le aplicó porque la viga, que se elevaba muy por encima de la cubierta del barco, se podía ver operando, y su movimiento de balanceo recordaba (con algo de imaginación) al movimiento producido al caminar.
Eran un tipo de motor adecuado para ruedas de paletas y rara vez se usaron para propulsar hélices. Se utilizaron principalmente para barcos y embarcaciones que trabajan en ríos, lagos y a lo largo de la costa, pero fueron una opción menos popular para las embarcaciones marítimas, porque la gran altura del motor hacía que la embarcación fuera menos estable en mares agitados.[18] También tenían un uso militar limitado, porque el motor estaba expuesto al fuego enemigo y, por lo tanto, podía ser inutilizado fácilmente. Su popularidad en los Estados Unidos se debe principalmente al hecho de que era muy adecuado para los barcos de calado reducido que operaban en los cursos de agua superficiales costeras y del interior de Estados Unidos.[17]
Los motores de viga andante siguieron siendo populares entre las líneas navieras estadounidenses y las operaciones de excursiones hasta principios del siglo XX. Aunque técnicamente habían quedado obsoletos a finales del siglo XIX, seguía siendo populares entre los pasajeros de barcos de vapor que esperaban ver la "viga andante" en movimiento. También hubo razones técnicas para su permanencia en los Estados Unidos, ya que era más fácil de construir y requería menos precisión. La madera podría usarse para el bastidor principal del motor, a un costo mucho menor que la práctica típica de usar piezas de fundición de hierro para diseños de motores más modernos. El combustible también era mucho más barato en Estados Unidos que en Europa, por lo que la menor eficiencia de este motor era menos importante. El constructor naval de Filadelfia, Charles H. Cramp, culpó a la falta general de competitividad de los Estados Unidos con respecto a la industria de la construcción naval británica a mediados y finales del siglo XIX por el conservadurismo de los constructores navales y propietarios de líneas navieras estadounidenses, que se aferraron obstinadamente a tecnologías obsoletas como la viga andante y su rueda de paletas asociada, mucho después de haber sido abandonada en otras partes del mundo.[19]
-
 Diagrama básico de un motor de viga andante
Diagrama básico de un motor de viga andante -
 USS Delaware (1861). La viga andante en forma de diamante de la embarcación se puede ver claramente en medio del barco
USS Delaware (1861). La viga andante en forma de diamante de la embarcación se puede ver claramente en medio del barco

.jpg)
Campanario[editar]

El motor de campanario, a veces denominado motor de "cruceta", fue un intento temprano de romper con el concepto de viga, común tanto para el tipo de viga andante como para el de palanca lateral, y crear un diseño más pequeño, más liviano y más eficiente. En un motor de campanario, la oscilación vertical del pistón no se convierte en un movimiento de balanceo horizontal como en un motor de balancín, sino que se usa para mover un conjunto, compuesto por una cruceta y dos barras, a través de una guía vertical en la parte superior del motor, que a su vez hace girar la biela del cigüeñal situado por debajo.[20] En los primeros ejemplos de este tipo, el ensamblaje de la cruceta era de forma rectangular, pero con el tiempo se perfeccionó en una forma de triángulo alargado. El conjunto triangular sobre el cilindro del motor le da al motor su característica forma de "campanario", de ahí su nombre.
Como los motores de viga andante, eran altos, pero mucho más estrechos lateralmente, lo que ahorraba espacio y peso. Debido a su altura y alto centro de gravedad, eran considerados menos apropiados para el servicio oceánico, pero siguieron siendo muy populares durante varias décadas, especialmente en Europa, dando servicio a los barcos utilizados en las vías navegables y a las embarcaciones costeras.[21]
Los motores de campanario comenzaron a aparecer en barcos de vapor en la década de 1830 y el tipo fue perfeccionado a principios de la década de 1840 por el constructor naval escocés David Napier,[22] aunque acabaría siendo reemplazado gradualmente por los diversos tipos de motores de acción directa.
Siamés[editar]
El motor siamés, también conocido como motor de "doble cilindro" o "cilindros gemelos", era otra alternativa temprana al motor de viga o de leva lateral. Este tipo de motor tenía dos cilindros verticales idénticos dispuestos uno al lado del otro, cuyos vástagos de pistón estaban unidos a una cruceta común en forma de T. El brazo vertical de la cruceta se extendía hacia abajo entre los dos cilindros y se unía en la parte inferior a la biela del cigüeñal y a un bloque guía que se deslizaba entre los lados verticales de los cilindros, lo que permitía que el mecanismo mantuviera la trayectoria correcta mientras se movía.[23]
Fue inventado por el ingeniero británico Joseph Maudslay (hijo de Henry), pero aunque lo inventó después de su motor oscilante (ver más abajo), no logró la misma aceptación generalizada, ya que solo era ligeramente más pequeño y liviano que el motor de levas laterales al que pretendía reemplazar.[24] Sin embargo, se utilizó en varios buques de guerra de mediados de siglo, incluido el primer buque de guerra equipado con una hélice, el HMS Rattler.
-
 Diagrama de un motor anular (ver más abajo) con mecanismo de conexión siamés
Diagrama de un motor anular (ver más abajo) con mecanismo de conexión siamés -
 Motor siamés del HMS Retribution (1844)
Motor siamés del HMS Retribution (1844)


Acción directa[editar]
En la literatura del siglo XIX se encuentran dos definiciones del motor de acción directa. La primera definición aplica el término "acción directa" a cualquier tipo de motor que no sea un motor de balancín (es decir, viga andante, leva lateral o saltamontes). La definición posterior solo usa el término para aquellos motores que aplican la potencia directamente al cigüeñal a través del vástago del pistón y/o una biela de conexión.[25] A menos que se indique lo contrario, este artículo utiliza esta última definición.
A diferencia del motor de palanca lateral o de viga, un motor de acción directa podría adaptarse fácilmente para impulsar indistintamente ruedas de paletas o una hélice. Además de ofrecer un perfil más bajo, los motores de acción directa tenían la ventaja de ser más pequeños y pesar considerablemente menos que los motores de viga o de palanca lateral. La Royal Navy descubrió que, en promedio, un motor de acción directa (según la primera definición) pesaba un 40% menos y requería una sala de máquinas de solo dos tercios del tamaño necesario para una máquina de palancas laterales de potencia equivalente. Una desventaja de tales motores es que eran más propensos al desgaste y, por lo tanto, requerían más mantenimiento.[24]
Oscilante[editar]
Un motor oscilante era un tipo de motor de acción directa diseñado para lograr mayores reducciones de su tamaño y su peso. Tenían las bielas conectadas directamente al cigüeñal, prescindiendo de la necesidad de bielas. Para lograr esto, los cilindros del motor no estaban inmóviles como en la mayoría de los motores, sino que estaban asegurados en el medio por muñones que permitían que los mismos cilindros giraran hacia adelante y hacia atrás mientras el cigüeñal giraba, de ahí el término oscilante.[26] El vapor se suministraba y se evacuaba a través de los muñones. El movimiento oscilante del cilindro se usaba generalmente para alinear los puertos en los muñones, con el fin de dirigir la alimentación de vapor y el escape al cilindro en los momentos correctos. Sin embargo, a menudo se utilizaron válvulas separadas, controladas por el movimiento oscilante, lo que permitía ajustar el tiempo del trabajo expansivo (como en el motor del barco de paletas PD Krippen). Esto proporciona simplicidad, y permite conservar la ventajas de su compacidad.
El primer motor oscilante patentado fue construido por Joseph Maudslay en 1827, pero se considera que el tipo fue perfeccionado por John Penn. Los motores oscilantes siguieron siendo un tipo popular de motor marino durante gran parte del siglo XIX.[26]
-
 Motores oscilantes para ruedas de paletas en el HMS Black Eagle. Los motores oscilantes podían usarse para impulsar ruedas de paletas o hélices
Motores oscilantes para ruedas de paletas en el HMS Black Eagle. Los motores oscilantes podían usarse para impulsar ruedas de paletas o hélices -
 Motor oscilante construido en 1853 por J. & A. Blyth de Londres para el vapor de remo austriaco Orsova
Motor oscilante construido en 1853 por J. & A. Blyth de Londres para el vapor de remo austriaco Orsova


Cofre[editar]
El motor de cofre, otro tipo de motor de acción directa, se desarrolló originalmente como un medio para reducir la altura de un motor mientras se conserva una carrera larga, factor que se consideraba importante en este momento porque reducía la tensión en los componentes.
En este motor se ubicaba una biela dentro de la biela del pistón, hueca y de gran diámetro. Este "cofre" casi no transmite carga, puesto que está abierto al aire exterior y es lo suficientemente ancho como para acomodar el movimiento de lado a lado de la biela, que une un pasador en la cabeza del pistón con un cigüeñal exterior.
Las paredes del cofre estaban atornilladas al pistón o fundidas como una sola pieza con él, y se movían de un lado a otro con él. La porción de trabajo del cilindro era anular o en forma de anillo, con el cofre pasando por el centro del cilindro.[27][28]
Los primeros ejemplos de motores de cofre tenían cilindros verticales. Sin embargo, los constructores de barcos se dieron cuenta rápidamente de que el tipo era lo suficientemente compacto como para colocarlo horizontalmente sobre la quilla. En esta configuración, fue muy útil para las marinas, ya que tenía un perfil lo suficientemente bajo como para caber completamente debajo de la línea de flotación de un barco, lo más alejado posible del fuego enemigo. El tipo fue generalmente producido para el servicio militar por John Penn.
Estos motores eran comunes en los buques de guerra de mediados del siglo XIX.[28] También impulsaron embarcaciones comerciales, donde, aunque valoradas por su tamaño compacto y bajo centro de gravedad, eran costosos de operar. Sin embargo, no funcionaron bien con las presiones de caldera más altas que prevalecieron en la segunda mitad del siglo XIX, y los constructores los abandonaron por otras soluciones.
Eran normalmente grandes, pero se produjo una versión pequeña, fabricada en masa, de altas revoluciones y alta presión para la Guerra de Crimea. Al ser bastante efectivo, el tipo persistió en cañoneras posteriores.[29] Existe un motor de cofre original del tipo cañonera en el Museo de Australia Occidental en Fremantle. Después de hundirse en 1872, fue recuperado en 1985 del SS Xantho y ahora se puede accionar manualmente.[30] El modo de funcionamiento del motor, que ilustra su naturaleza compacta, se puede ver en el sitio web del proyecto Xantho.[31]
-
 Ilustración de un motor de cofre
Ilustración de un motor de cofre -
 Vista en sección del motor de de cofre del HMS Bellerophon, que muestra (a la izquierda) el cilindro del motor, el conjunto de pistón y cofre anulares y la biela dentro del cofre
Vista en sección del motor de de cofre del HMS Bellerophon, que muestra (a la izquierda) el cilindro del motor, el conjunto de pistón y cofre anulares y la biela dentro del cofre -
 Vista del motor de cofre del HMS Warrior (1860). La biela se puede ver saliendo del cofre a la derecha
Vista del motor de cofre del HMS Warrior (1860). La biela se puede ver saliendo del cofre a la derecha



Palanca vibratoria[editar]
_vibrating-lever_engine.jpg)
La palanca vibratoria, o motor de medio cofre, fue un desarrollo del motor de cofre convencional concebido por el ingeniero sueco-estadounidense John Ericsson. Ericsson necesitaba un motor pequeño y de bajo perfil como el motor de cofre para alimentar los acorazados tipo monitor del gobierno federal de EE. UU., una clase de buque de guerra desarrollado durante la Guerra Civil Estadounidense que tenía muy poco espacio para un motor convencional.[32] Sin embargo, el motor de cofre en sí no era adecuado para este propósito, porque la preponderancia del peso estaba en el lado del motor que contenía el cilindro y el cofre, un problema que los diseñadores no pudieron compensar en los pequeños buques de guerra del tipo monitor.
| Video externo | ||
|---|---|---|
|
| ||
Atención: este archivo está alojado en un sitio externo, fuera del control de la Fundación Wikimedia. |
Ericsson resolvió este problema colocando dos cilindros horizontales consecutivos en el medio del motor, trabajando sobre dos "palancas vibratorias", una a cada lado, que por medio de ejes y palancas adicionales hacían girar un cigüeñal también ubicado en el centro.[32] Los motores de palanca vibratoria se usaron más tarde en algunos otros buques de guerra y buques mercantes, pero su uso se limitó a los barcos construidos en los Estados Unidos y en el país natal de Ericsson, Suecia,[33] y pronto tuvieron pocas ventajas sobre los motores más convencionales, siendo suplantados por otros tipos.
Acción de retorno[editar]
El motor de acción de retorno, también conocido como motor de biela de retorno conectada, era otro tipo de motor diseñado para tener un perfil muy bajo. Era un motor de campanario modificado, colocado horizontalmente sobre la quilla de un barco en lugar de estar situado verticalmente.[33] Sin embargo, en lugar del conjunto de cruceta triangular que se encuentra en un motor de campanario típico, el motor de acción de retorno generalmente usaba un conjunto de dos o más vástagos de pistón paralelos alargados que terminaban en una cruceta para realizar la misma función. El término "biela de retorno" se deriva del hecho de que la biela "regresa" desde el lado del motor opuesto al cilindro para hacer girar un cigüeñal ubicado en el centro.[34]
Eran populares tanto en buques de guerra como en embarcaciones comerciales a mediados del siglo XIX, pero como muchos otros tipos de motores en esta era de rápidos cambios tecnológicos, finalmente fueron abandonados para adoptar otras soluciones. Solo hay un motor de acción de retorno conservado que se conozca: el TV Emery Rice (anteriormente USS Ranger), ahora la pieza central de una exhibición en el Museo de la Academia de la Marina Mercante de los Estados Unidos.[35][36]
-
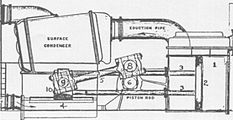 Diagrama del motor de retorno del USS Ranger
Diagrama del motor de retorno del USS Ranger -
 Motor de biela de retorno del HMS Agincourt (1865)
Motor de biela de retorno del HMS Agincourt (1865)


Vertical[editar]
A medida que los barcos de vapor crecieron constantemente en tamaño y tonelaje a lo largo del siglo XIX, la necesidad de motores de bajo perfil y bajo centro de gravedad disminuyó correspondientemente. Liberados cada vez más de estas limitaciones, los ingenieros pudieron volver a diseños más simples, más eficientes y más fáciles de mantener. El resultado fue el dominio creciente del llamado motor "vertical"[25] (más correctamente conocido como motor de acción directa invertida vertical).
En este tipo de motor, los cilindros se encuentran directamente encima del cigüeñal, con los conjuntos de [biela/biela de conexión] formando una línea más o menos recta entre los dos.[25] La configuración es similar a la de un motor de combustión interna moderno (una diferencia notable es que la máquina de vapor es de doble efecto, véase más abajo, mientras que casi todos los motores de combustión interna generan energía solo en la carrera descendente). Los motores verticales a veces se denominaron motores "martillo", "martillo de forja" o "martillo de vapor", debido a su aspecto más o menos similar a otra tecnología de vapor común del siglo XIX, el martillo de vapor.[37]
Los motores verticales llegaron a reemplazar a casi cualquier otro tipo de motor de vapor marino hacia finales del siglo XIX.[25][37] Debido a que se volvieron tan comunes, se identifican en función de su tecnología de cilindro, es decir, compuestos, triple expansión, cuádruple expansión, etc. El término "vertical" para este tipo de motor es impreciso, ya que técnicamente cualquier tipo de máquina de vapor es "vertical" si el cilindro está orientado verticalmente. Un motor que alguien describe como "vertical" podría no ser del tipo de acción directa invertida vertical, a menos que use el término "vertical" sin más.
-
 Diagrama de un motor simple "martillo"
Diagrama de un motor simple "martillo" -
 Motor vertical de triple-expansión del USS Wisconsin (BB-9). La disposición vertical típica del cilindro, la biela, la biela de conexión y el cigüeñal se puede ver claramente en esta foto
Motor vertical de triple-expansión del USS Wisconsin (BB-9). La disposición vertical típica del cilindro, la biela, la biela de conexión y el cigüeñal se puede ver claramente en esta foto

_engines_cropped.JPG)
Motores clasificados por la tecnología de los cilindros[editar]
Expansión simple[editar]
Un motor de expansión simple es un motor de vapor que expande el vapor a través de una sola etapa, es decir, todos sus cilindros funcionan a la misma presión. Dado que este fue, con mucho, el tipo de motor más común en el período inicial del desarrollo del motor marino, rara vez se encuentra el término "expansión simple". Se supone que un motor es de expansión simple a menos que se indique lo contrario.
Compuesto[editar]
Un motor compuesto es una máquina de vapor que opera sus cilindros a través de más de una etapa, a diferentes niveles de presión. Los motores compuestos eran un método para mejorar la eficiencia. Hasta el desarrollo de los motores compuestos, las máquinas de vapor usaban el vapor solo una vez antes de reciclarlo de nuevo a la caldera. Un motor compuesto recicla el vapor en uno o más segundos cilindros más grandes y de menor presión primero, para usar más de su energía térmica. Los motores compuestos podrían configurarse para aumentar la economía de un barco o su velocidad. En términos generales, un motor compuesto puede referirse a una máquina de vapor con cualquier número de cilindros de presión diferente; sin embargo, el término generalmente se refiere a motores que expanden el vapor a través de solo dos etapas, es decir, aquellos que operan cilindros a solo dos presiones diferentes (o motores de "doble expansión").[38]
Debe tenerse en cuenta que un motor compuesto (incluidos los motores de expansión múltiple, véase más abajo) puede tener más de un conjunto de cilindros de presión variable. Por ejemplo, un motor puede tener dos cilindros operando a presión X y dos operando a presión Y, o un cilindro operando a presión X y tres operando a presión Y. Lo que lo hace compuesto (o de doble expansión) en oposición a la expansión múltiple, es que solo hay dos presiones, X e Y.[39]
El primer motor compuesto que se cree que se instaló en un barco fue instalado en el Henry Eckford por el ingeniero estadounidense James P. Allaire en 1824. Sin embargo, muchas fuentes atribuyen la "invención" del motor compuesto al marino de Glasgow John Elder en la década de 1850. Elder realizó mejoras en el motor compuesto, que lo hizo seguro y económico para los viajes por el océano por primera vez.[40][41]
Expansión triple o múltiple[editar]
Un motor de triple expansión es un motor compuesto que expande el vapor en tres etapas, es decir, un motor con tres cilindros a tres presiones diferentes. Un motor de expansión cuádruple expande el vapor en cuatro etapas, y así sucesivamente.[39] El primer uso comercial exitoso fue un motor construido en Govan, Escocia por Alexander C. Kirk para el SS Aberdeen en 1881.[42]
La fabricación de motores de expansión múltiple continuó hasta bien entrado el siglo XX. Todos los 2.700 buques Liberty construidos por los Estados Unidos durante la Segunda Guerra Mundial estaban propulsados por motores de triple expansión, porque la capacidad de los EE. UU. de fabricar turbinas de vapor marinas estaba completamente dirigida a la construcción de buques de guerra. El mayor fabricante de motores de triple expansión durante la guerra fue Joshua Hendy Iron Works. Hacia el final de la guerra, se fabricaron naves Victory con turbinas en cantidades crecientes.
-
 Un motor de triple expansión Joshua Hendy
Un motor de triple expansión Joshua Hendy -
 Un motor de triple expansión en el Lydia Eva (deriva de vapor)
Un motor de triple expansión en el Lydia Eva (deriva de vapor) -
 Un motor de triple expansión en el remolcador oceánico Hércules de 1907
Un motor de triple expansión en el remolcador oceánico Hércules de 1907 -
 Motor vertical de triple expansión 140-ton – (también descrito como 135-ton –), usado para impulsar los barcos del tipo Liberty, ensamblado para probar antes de la entrega. El motor tiene 21 pies (6,4 metros) de largo y 19 pies (5,8 metros) de alto y fue diseñado para operar a 76 rpm y propulsar un barco Liberty a aproximadamente 11 nudos (12.7 mph; 20.4 km/h)
Motor vertical de triple expansión 140-ton – (también descrito como 135-ton –), usado para impulsar los barcos del tipo Liberty, ensamblado para probar antes de la entrega. El motor tiene 21 pies (6,4 metros) de largo y 19 pies (5,8 metros) de alto y fue diseñado para operar a 76 rpm y propulsar un barco Liberty a aproximadamente 11 nudos (12.7 mph; 20.4 km/h)




Anular[editar]
Un motor anular es un tipo inusual de motor que utiliza un cilindro anular (en forma de anillo).[43] Algunos de los primeros motores compuestos del ingeniero pionero estadounidense James P. Allaire eran del tipo anular, con un cilindro de alta presión más pequeño colocado en el centro de un cilindro de baja presión más grande y en forma de anillo.[44] Los motores de cofre eran otro tipo de motor anular. Un tercer tipo de motor marino anular utilizaba el mecanismo de conexión del motor siamés, pero en lugar de dos cilindros separados, tenía un solo cilindro de forma anular envuelto alrededor del brazo vertical de la cruceta (véase el diagrama debajo de "Siamés" más arriba).[45]
Otros términos[editar]
Algunos otros términos se encuentran en la literatura de motores marinos de la época. Estos términos, que se enumeran a continuación, generalmente se usan junto con uno o más de los términos básicos de clasificación del motor enumerados anteriormente.
Simple[editar]
Un motor simple es un motor que funciona con una sola expansión de vapor, independientemente de la cantidad de cilindros instalados en el motor. Hasta mediados del siglo XIX, la mayoría de los barcos tenían motores con un solo cilindro, aunque algunos barcos tenían motores simples de múltiples cilindros y / o más de un motor.
Doble efecto[editar]
Un motor de doble efecto es un motor donde se aplica vapor a ambos lados del pistón. Anteriormente, las máquinas de vapor aplicaban vapor en una sola dirección, lo que permitía que el impulso o la gravedad devolvieran el pistón a su lugar de partida, pero una máquina de doble efecto utiliza vapor para forzar el pistón en ambas direcciones, lo que aumenta la velocidad de rotación y la potencia.[46] Al igual que el término "motor simple", el término "doble efecto" se encuentra con menos frecuencia en la literatura ya que casi todos los motores marinos eran del tipo de doble efecto.
Vertical, horizontal, inclinado, invertido[editar]
Estos términos se refieren a la orientación del cilindro del motor. Un cilindro vertical se coloca verticalmente con su vástago de pistón operando encima (o debajo). Un motor invertido vertical se define como una disposición de cilindro vertical, con el cigüeñal montado directamente debajo de los cilindros. Con un tipo inclinado u horizontal, el cilindro y el pistón se colocan en una inclinación u horizontalmente. Un cilindro invertido inclinado es un cilindro invertido que funciona en un plano oblicuo. Estos términos se usan generalmente en conjunto con los tipos de motores anteriores. Por lo tanto, se puede tener un motor de acción directa horizontal, o un motor de doble acción compuesto inclinado, etc.
Los cilindros inclinados y horizontales podrían ser muy útiles en los buques de guerra, ya que su orientación mantenía el perfil del motor lo más bajo posible y, por lo tanto, menos susceptible a sufrir daños por el fuego enemigo.[47] También podían usarse en un barco de bajo perfil o para mantener el centro de gravedad del buque más bajo. Además, los cilindros inclinados u horizontales tenían la ventaja de reducir la cantidad de vibración en comparación con un cilindro vertical.
Con engranajes[editar]
Un motor con engranajes permite que la hélice gire a una velocidad diferente de la del motor. Los primeros motores de hélice marina disponían de engranajes multiplicadores, es decir, la hélice estaba diseñada para funcionar a una velocidad de rotación más alta que el motor.[48][49] A medida que los motores se volvieron más rápidos y potentes a lo largo de la última parte del siglo XIX, se prescindió casi universalmente del engranaje y la hélice funcionaba a la misma velocidad de rotación que el motor. Esta disposición de accionamiento directo es mecánicamente más eficiente, y las máquinas de vapor recíprocas se adaptan bien a la velocidad de rotación más eficiente para las hélices usuales.
Véase también[editar]
- Destilador marino, aparato de la caldera para obtener agua potable a partir del agua de mar.
- Barco de vapor
- Máquina de vapor
Referencias[editar]
- ↑ Fry, p. 27.
- ↑ Fry, pp. 37-42.
- ↑ Fry, Chapter 5.
- ↑ Sennett and Oram, pp. 2-4.
- ↑ a b Murray, p. 4.
- ↑ a b Fox, p. 119.
- ↑ Sennett and Oram, p. 2-4.
- ↑ Sennet and Oram, p. 3.
- ↑ Maginnis, p. xiv.
- ↑ Rippon, Commander P.M., RN (1998). The evolution of engineering in the Royal Navy. Vol 1: 1827-1939. Spellmount. pp. 19-20. ISBN 0-946771-55-3.
- ↑ a b Seaton, pp. 3-5.
- ↑ Hilton, p. 59.
- ↑ a b Ward, p. 60.
- ↑ Laxton, p. 334.
- ↑ Adams, p. 202.
- ↑ Harvey, p. 55.
- ↑ a b Thurston, p. 379.
- ↑ Sutherland, p. 31.
- ↑ Buell, pp. 92-93.
- ↑ Hebert.
- ↑ Evers, p. 88.
- ↑ Dumpleton, p. 83.
- ↑ Evers, p. 89.
- ↑ a b Murray, p. 14.
- ↑ a b c d Sennett and Oram, p. 12.
- ↑ a b Chatterton, p. 132.
- ↑ Evers, pp. 90–91.
- ↑ a b Sennett and Oram, pp. 7–8. See also the preceding section in this reference, entitled "Horizontal engines".
- ↑ Osbon, G. A. (1965). «The Crimean gunboats. Part 1». The Mariner's Mirror 51: 103-116. ISSN 0025-3359. doi:10.1080/00253359.1965.10657815.
- ↑ «The Children - Western Australian Museum». Western Australian Museum. Consultado el 27 de marzo de 2018.
- ↑ «Restoring the Xantho engine.». 10 de agosto de 2011. Archivado desde el original el 10 de agosto de 2011. Consultado el 27 de marzo de 2018.
- ↑ a b Steam Launch Artemis - Engine Archivado el 6 de marzo de 2010 en Wayback Machine., www.pcez.com.
- ↑ a b "Emory Rice T. V. Engine (1873)" Archivado el 9 de diciembre de 2008 en Wayback Machine., American Society of Mechanical Engineers, p. 4.
- ↑ Sennett and Oram, pp. 7,9.
- ↑ Emery Rice T. V. Engine (1873) Archivado el 9 de diciembre de 2008 en Wayback Machine., American Society of Mechanical Engineers brochure.
- ↑ Emery Rice Archivado el 13 de junio de 2010 en Wayback Machine., American Maritime Museum.
- ↑ a b Evers, p. 81.
- ↑ Thurston, 391-396.
- ↑ a b Fry, Chapter XI.
- ↑ MacLehose, p. 118.
- ↑ Thurston, pp. 393-396.
- ↑ Day, Lance and McNeil, Ian (Editors) 2013, Biographical Dictionary of the History of Technology Routledge, ISBN 0-203-02829-5 (P. 694)
- ↑ Murray, pp.15-16.
- ↑ Murray, pp. 376-377. Véase la descripción del motoe del Buckeye State.
- ↑ Murray, pp. 15-16.
- ↑ Thurston, p. 110.
- ↑ Murray. pp. 17-18.
- ↑ Murray, p. 18.
- ↑ Fry, pp. 167-168.
Bibliografía[editar]
- American Society of Mechanical Engineers (1978): Joshua Hendy Iron Works - informational brochure.
- Buell, Augustus C. (1906): The Memoirs of Charles H. Cramp, J. B. Lippincott Co., Philadelphia and London, pp. 92–93.
- Chatterton, E. Keble (1910): Steamships and their Story, page 132, Cassell and Company Ltd.
- Dumpleton, Bernard (2002): The Story Of The Paddle Steamer, Intellect Books (UK), ISBN 978-1-84150-801-6.
- Evers, Henry (1873): Steam and the Steam Engine: Land, Marine and Locomotive, William Collins, Sons & Co., London and Glasgow.
- Fox, Stephen (2003): Transatlantic: Samuel Cunard, Isambard Brunel, and the Great Atlantic Steamships, HarperCollins, ISBN 978-0-06-019595-3.
- Fry, Henry (1896): The History of North Atlantic Steam Navigation: With Some Account of Early Ships and Shipowners, Sampson Low, Marston & Co., London.
- Harvey, Steven (2007): It Started With a Steamboat: An American Saga, Authorhouse, p. 55, ISBN 978-1-4259-6719-2
- Hilton, George W. (2002): Lake Michigan Passenger Steamers, Stanford University Press, p. 59, ISBN 978-0-8047-4240-5.
- Kludas, Arnold (2000?): Record Breakers of the North Atlantic: Blue Riband Liners 1838–1952, Brassey's, Inc., Washington, D.C., ISBN 1-57488-328-3.
- Laxton, Frederick William (1855): The Civil Engineer and Architect's Journal, incorporated with The Architect, Volume XVIII, John Knott, London.
- MacLehose, James (1906): Memoirs and portraits of one hundred Glasgow men who have died during the last thirty years and in their lives did much to make the city what it now is, James MacLehose & Sons, Glasgow, p. 118, as reproduced by the Glasgow Digital Library.
- Maginnis, Arthur J. (1900): The Atlantic Ferry: Its Ships, Men and Working, Whittaker and Co., London and New York.
- Murray, Robert (1858): Rudimentary Treatise on Marine Engines and Steam Vessels: Together with Practical Remarks on the Screw and Propelling Power as Used in the Royal and Merchant Navy, Published by J. Weale.
- Seaton, Albert Edward (1885): A Manual Of Marine Engineering - Comprising The Designing, Construction, And Working Of Marine Machinery, 4th Edition, Charles Griffin & Co., London.
- Sennett, Richard and Oram, Sir Henry J. (1918): The Marine Steam Engine: A Treatise for Engineering Students, Young Engineers, and Officers of the Royal Navy and Mercantile Marine, Longmans, Green & Co., London, New York, Bombay and Calcutta.
- Sutherland, John Lester (2004): Steamboats of Gloucester and the North Shore, The History Press, ISBN 978-1-59629-000-6, pp. 31-32.
- Thurston, Robert Henry (1883): A History of the Growth of the Steam-engine, reprinted 2001 by Adamant Media Corporation, ISBN 978-1-4021-6205-3.
- Ward, J. H.: (1864): A Popular Treatise on Steam, and its Application to the Useful Arts, Especially to Navigation, D. Van Nostrand, New York, p. 60.
Enlaces externos[editar]
- Video del modelo de motor de palanca vibratoria de USS Monitor en YouTube
- Video de motor oscilante invertido inclinado en YouTube
- Tradición Sidewheel Steamboat Walking Beam Engine en YouTube
| Control de autoridades |
|
|---|
 Datos: Q12061488
Datos: Q12061488 Multimedia: Marine steam engines / Q12061488
Multimedia: Marine steam engines / Q12061488